In a notable development, electric vehicle manufacturer Tesla has recently filed a patent for a cutting-edge steer-by-wire system. This technology, previously reported on by Electrek, marks a significant step forward in the company’s efforts to incorporate steer-by-wire capabilities into their line of electric vehicles.
The steer-by-wire system revolutionizes traditional steering mechanisms by replacing mechanical linkages with electrical or electromechanical systems. By relying solely on these innovative systems, Tesla aims to enhance efficiency, introduce improved steering configurations, and provide greater flexibility in designing the vehicle’s cockpit.
However, it is worth noting that numerous markets currently mandate the inclusion of mechanical linkages in steering systems for a vehicle to meet road legality requirements. Despite this hurdle, Tesla, like other leading automakers, has already integrated motors and actuators for drive controls, facilitating the implementation of assisted driving features such as Autopilot and Full Self-Driving. Nevertheless, their steering systems still retain a mechanical link.
During the course of 2021, Tesla’s CEO, Elon Musk, confirmed the company’s ongoing endeavors to develop progressive steer-by-wire technology. However, he cautioned that its widespread implementation was still several years away.
Now, the latest revelation of Tesla’s patent application for a steer-by-wire system sheds further light on their progress in this area.
The abstract of the patent application provides insight into the system’s key features:
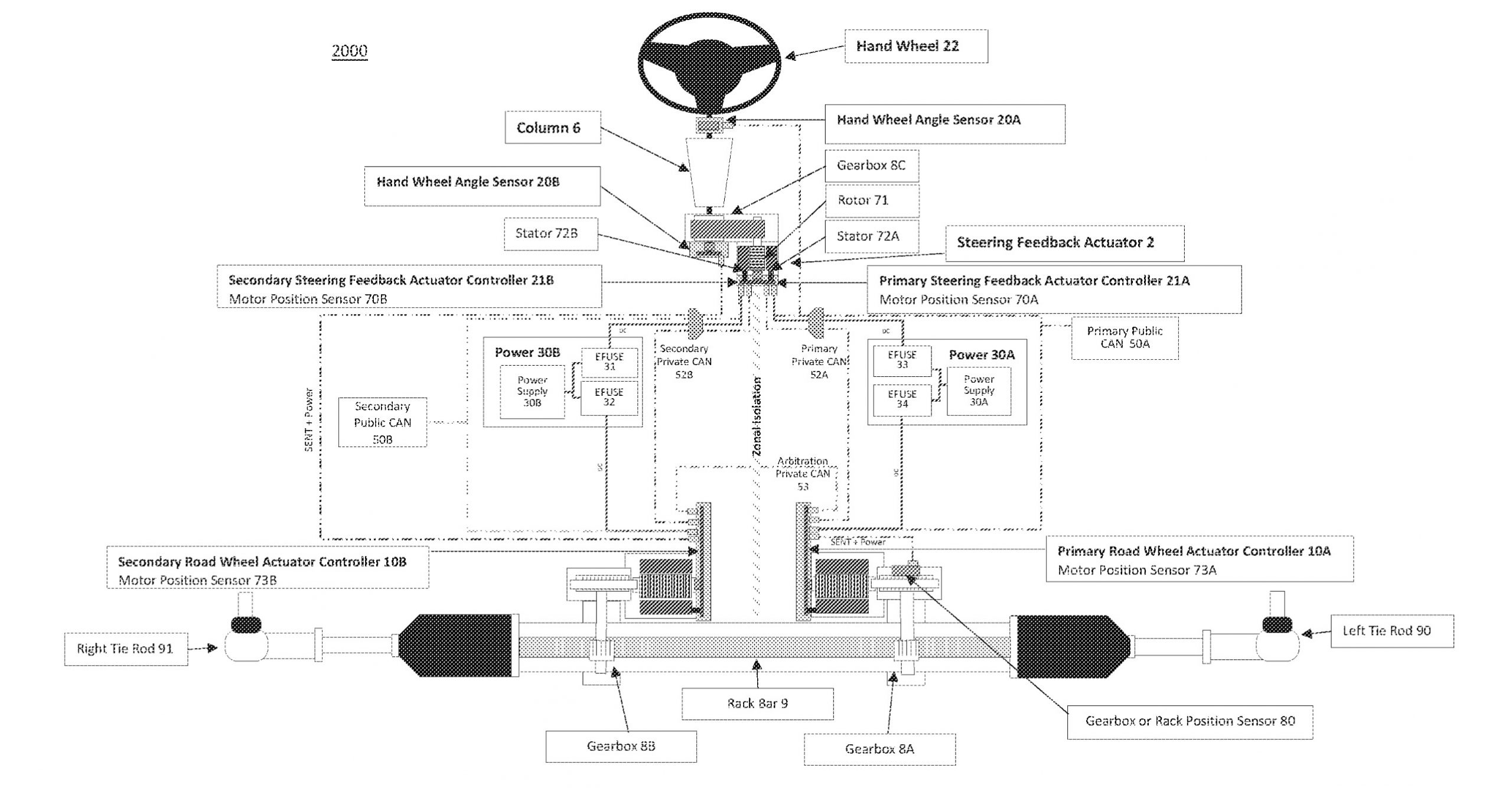
“The vehicle steering system by wire offers control over the lateral motion of the vehicle. The system comprises a steering wheel torque feedback actuator assembly, equipped with two controllers, and a front road wheel steering actuator assembly with two zonally isolated motors and controllers. Additionally, it incorporates two separate power assemblies, two distinct vehicle communication networks housed within separate wiring bundle assemblies, and three private system communication networks interconnecting each node within the steering system. Crucially, the redundant components are zonally isolated to mitigate the risks associated with common faults. Furthermore, the system may encompass a differential gearbox road wheel actuator to ensure precise positioning of the road wheels, along with a set of position sensor assemblies comprising two magnetic and one inductive sensor assemblies.”